Utiliser le robot Maqueen sur Python
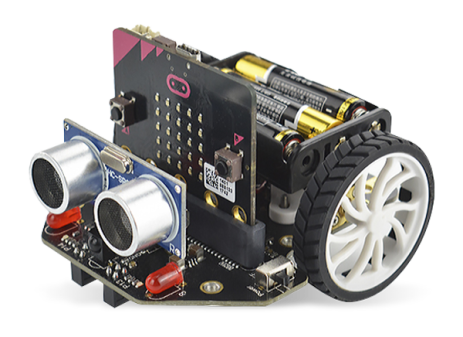
Le robot Maqueen micro:bit est un robot très bon marché (autour de 20€) contrôlé par la carte micro:bit. Il est petit, maniable et facile d'utilisation. Il possède beaucoup de fonctionnalités :
capteurs de suivi de ligne
LEDs
4 LED RVB neopixel pour éclairage d'ambiance
capteur de distance ultrason
buzzer pour effets sonores
moteurs à engrenage contrôlables séparément par i2c
alimentation par pack de 3 piles AAA
capteur infrarouge permettant au robot d'être télécommandé
A l'origine, ce robot se programme par blocs. J'ai développé un module python permettant de le programmer facilement sous Python également.
Méthode : Installation du module pilote maqueen sous Python
Pour installer le module sur Mu-editor :
téléchargez le module maqueen.zip [zip][1] et décompressez-le dans votre dossier mu_code
Dans Mu, cliquez sur l'icône ![]()
Si vous avez copié le fichier maqueen.py dans le dossier mu_code, vous devriez le voir apparaître coté ordinateur. glissez-le sur la carte micro:bit. Vous devriez obtenir quelque chose du genre : maqueenFichier.png[2]
Fondamental : Méthodes fournies par le module
avance(vitesse) : avance en ligne droite. vitesse est un nombre entre 0 et 100. Ce paramètre est optionnel. Si non spécifié, c'est la dernière vitesse spécifiée lors de avance() ou setVitesse() qui sera utilisée.
recule() : fait marche arrière.
stop() : stoppe les moteurs
moteurDroit(vitesse) : fait tourner la roue droite.
moteurGauche(vitesse) : fait tourner la roue gauche.
getVitesse() : renvoie la vitesse paramétrée par setVitesse() ou avance()
setVitesse() : change la valeur de la vitesse utilisée par avance, recule, moteur*
distance() : renvoie la distance (en cm) lue par le capteur ultrason
son_r2d2() et son_bip() : effets sonores
Complément : Accès aux autres fonctions du robot
Sur le circuit imprimé du robot figurent les adresses des broches pour les LEDs et capteurs de ligne. les voici pour rappel :
LEDs rouges : 8 (gauche) et 12 (droite). Ex : pin8.write_digital(1)
Neopixel : pin15
capteurs de ligne : pin13 (gauche) et pin14 (droite). ex : pin13.read_digital()
infrarouge : pin16
# Exemple d'éclairage d'ambiance vert avec les neopixelsfrom microbit import *
from neopixel import NeoPixel
np=NeoPixel(pin15,4)
for i in range(4):
np[i]=(0,255,0)
np.show()
# np.clear() pour eteindre les neopixelsExemple : Utilisation du module
Voici un exemple concret vous permettant de tester le module depuis le REPL afin de vous assurer que tout fonctionne. Je vous conseille de tester cela avec le robot sur le dos pour éviter qu'il parte avec un fil à la patte !
>>> from maqueen import Maqueen
>>> mq=Maqueen()
>>> mq.distance() # permet de vérifier le module ultrason
>>> mq.avance(10)
>>> mq.stop()
>>> mq.moteurDroit()
>>> mq.moteurGauche(-10)
>>> mq.stop()
Exemple : Exemple de mini-projet
Il est temps maintenant de passer à la réalisation d'un véritable projet. Il y a les incontournables classiques comme le robot suiveur de ligne, le robot télécommandé par infrarouge ou le robot éviteur d'obstacles. A vous de jouer !
Complément : Listing du module maqueen
# The MIT License (MIT)# Copyright (c) 2016 British Broadcasting Corporation.# This software is provided by Lancaster University by arrangement with the BBC.# Permission is hereby granted, free of charge, to any person obtaining a# copy of this software and associated documentation files (the "Software"),# to deal in the Software without restriction, including without limitation# the rights to use, copy, modify, merge, publish, distribute, sublicense,# and/or sell copies of the Software, and to permit persons to whom the# Software is furnished to do so, subject to the following conditions:# The above copyright notice and this permission notice shall be included in# all copies or substantial portions of the Software.# THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR# IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,# FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL# THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER# LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING# FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER# DEALINGS IN THE SOFTWARE.# Olivier Lecluse# Avril 2019import microbit
import time
import machine
import music
class Maqueen():
def __init__(self,addr=0x10):
"""Initiaisation robot addr : adresse i2c. 0x10 par defaut"""self.addr=addr
self._vitesse=0 # vitesse entre 0 et 100
def getVitesse(self):
return self._vitesse
def setVitesse(self, v):
self._vitesse=v
def moteurDroit(self, v=None):
if v==None:
v=self._vitesse
sens=0 if v>=0 else 1 # sens moteur
vit=abs(v)*255//100 # vitesse moteur 0..255
microbit.i2c.write(self.addr,bytearray([0,sens, vit]))
def moteurGauche(self, v=None):
if v==None:
v=self._vitesse
sens=0 if v>=0 else 1 # sens moteur
vit=abs(v)*255//100 # vitesse moteur 0..255
microbit.i2c.write(self.addr,bytearray([2,sens, vit]))
def avance(self,v=None):
if v != None:
self._vitesse=v
self.moteurDroit()
self.moteurGauche()
def recule(self):
self.moteurDroit(-self._vitesse)
self.moteurGauche(-self._vitesse)
def stop(self):
microbit.i2c.write(self.addr,bytearray([0,0,0]))
microbit.sleep(1)
microbit.i2c.write(self.addr,bytearray([2,0,0]))
def distance(self):
"""Calcule la distance à l'obstacle en cm pin1 : Trig pin2 : Echo"""microbit.pin1.write_digital(1)
time.sleep_ms(10)
microbit.pin1.write_digital(0)
microbit.pin2.read_digital()
t2 = machine.time_pulse_us(microbit.pin2, 1)
d = 340 * t2 / 20000
return d
def son_r2d2(self):
tune=["A7:0", "G7:0", "E7:0","C7:0","D7:0","B7:0","F7:0","C8:0","A7:0","G7:0","E7:0","C7:0","D7:0","B7:0","F7:0","C8:0"]
music.play(tune)
def son_bip(self):
for i in range(2):
freq=2000
while freq>1000:
music.pitch(int(freq),10)
freq*=0.95
freq=1000
while freq<3000:
music.pitch(int(freq),10)
freq*=1.05